|
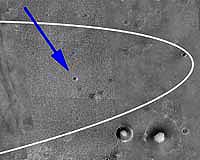
Moffett Field - Feb 16, 2004 "As you saw with Spirit," said Tim McElrath of the Opportunity's navigation team, "we have a number ways to locate a rover. The 44 by 5 miles across, that error ellipse was what we worked for six months to define before landing. We were fortunate to have two Deep Space Network tracking stations, so we could see two-way Doppler data all the way down during descent until the parachute opened. " "This narrowed the ellipse quite alot," said McElrath. "A 145 foot by 3 foot ellipse could be defined from two Odyssey passes over many sols. That is from the inertial solution, which tracks the rover's motion. That map could be off by about a quarter mile, but we did better than that by about 500 feet." "It is like the global position system (GPS) tells you from orbit your location [in coordinates], but not your street corner." "There is a second way we determine the position of the rover," said Dr. Andrew Johnson. "This is using EDL [entry, descent and landing] telemetry. There are 3 images from the path [trajectory] toward the ground. We moved from east, to when we cut the [spacecraft's connecting] bridle, when we were moving north. "Twenty-six bounces is the official number of bounces," said Johnson. "Finally we somehow, miraculously ended up in the crater. It was like the crater had some magical force attracting us. [After first airbag impact], there was a 1/8th mile roll for more than one minute. Our velocity was 9 meters per second (20 miles per hour) north." The surface bounce pattern has been compared previously to a golfer's hole-in-one, with the cup as the small crater that currently houses the rover. When first presented with the bounce data, JPL's Jeff Parker shook his head, "How many golfers out there?" "The third way we locate the rover is by feature maps," said Parker. "This includes descent images [DIMES], the Mars Orbital Camera [MOC] on the Mars Global Surveyor [MGS], and reconstruction to [images of] three craters on the horizon. One [crater] was visible from the pre-standup "mission-success" pan, and two visible post stand-up." "This was a diffult localization," said Parker, referring to what engineers call a 'solution' when narrowed to exact coordinates, "because the crater is so small, we can't make out features from the [crater] rim to distinguish it [from others in the orbital pictures]." "The radio tracking solution," concluded Parker, "was down to 120 feet ellipse from the DIMES image." The clinching data proved to be available from orbit. "I have a camera in orbit," said Dr. Michael Malin, of Malin Space Systems who designed and operates the Mars Orbital Camera on board the Mars Global Surveyor. "It flies over the landing site twice a day, once in the morning and once later each day." "The camera has 1.5 meter per pixel resolution," said Malin, and "using the spacecraft to help, super-resolution of 0.5 meters/pixel. That is 50 centimeters." The camera operates from 400 kilometers overhead. Presenting remarkable images that document the various stages of the MER mission, Malin highlighted various pieces of hardware now on the surface. "We see where the heat shield hit, the plume from when the retro rocket fired. Finally where the back shell and parachute hit." "This is a picture of the vehicle," said Malin, referring to a bright spot. "One thing to note is how big it is relative to the crater. It fills the size of the crater." "I believe we are seeing the rover, but it is dark with solar panels," said Malin, "so it may be a 'noise bit' but we'll know when we move. If that dark spot stays the same on the next camera pass, we'll know." Malin pointed out that the combination of orbital and surface imagery was important. "The navigation camera showed a view of the backshell and parachute from the lander." "The pancam [on the rover] has taken a picture of this, as it is quite an evocative image. From the rover, outside the low rim of the crater, it is quite a pretty picture, showing over this vast, flat surface, there is the hardware we have littered the surface with." Article is courtesy of NASA's Astrobiology Magazine team at Ames Research Center. This article is public domain and available for reprint with appropriate credit. Community Email This Article Comment On This Article Related Links SpaceDaily Search SpaceDaily Subscribe To SpaceDaily Express Mars News and Information at MarsDaily.com Lunar Dreams and more
 Pasadena CA (JPL) Jan 09, 2006
Pasadena CA (JPL) Jan 09, 2006Last week Spirit completed robotic-arm work on "El Dorado." The rover used all three of its spectrometers plus the microscopic imager for readings over the New Year's weekend. |
|
| The content herein, unless otherwise known to be public domain, are Copyright 1995-2006 - SpaceDaily.AFP and UPI Wire Stories are copyright Agence France-Presse and United Press International. ESA PortalReports are copyright European Space Agency. All NASA sourced material is public domain. Additionalcopyrights may apply in whole or part to other bona fide parties. Advertising does not imply endorsement,agreement or approval of any opinions, statements or information provided by SpaceDaily on any Web page published or hosted by SpaceDaily. Privacy Statement |